Membuat Robot Cartesian

1. Robot ini bekerja berdasarkan berat yang akan diterima oleh sensor loadcell yang kemudian akan dikirim ke dalam Hx711.
2. Hx711 akan mengolah data analog tersebut menjadi data digital kemudian dikirim ke mikrokontroler yaitu arduino uno yang kami gunakan
3.Didalam Arduino informasi tersebut di kelola dan diubah menjadi perintah kepada penggerak yaitu stepper dan gripper.
4.Robot akan berkerja berdasarkan 3 kondisi :
a. jika berat jeruk antara 30-50 gram maka robot bergerak ke lokasi 1
b. Jika berat jeruk antara 60-100 gram maka robot bergerak ke lokasi 2
b. Jika berat jeruk antara 100-125 gram maka robot bergerak ke lokasi 3
5. Setelah melakukan tugasnya maka robot akan kembali ketempat semula unutk menunggu proses berikutnya.
Untuk Komponen yang digunakan dalam perancangan robot ini adalah sebagai berikut :





Read More
1. Robot ini bekerja berdasarkan berat yang akan diterima oleh sensor loadcell yang kemudian akan dikirim ke dalam Hx711.
2. Hx711 akan mengolah data analog tersebut menjadi data digital kemudian dikirim ke mikrokontroler yaitu arduino uno yang kami gunakan
3.Didalam Arduino informasi tersebut di kelola dan diubah menjadi perintah kepada penggerak yaitu stepper dan gripper.
4.Robot akan berkerja berdasarkan 3 kondisi :
a. jika berat jeruk antara 30-50 gram maka robot bergerak ke lokasi 1
b. Jika berat jeruk antara 60-100 gram maka robot bergerak ke lokasi 2
b. Jika berat jeruk antara 100-125 gram maka robot bergerak ke lokasi 3
5. Setelah melakukan tugasnya maka robot akan kembali ketempat semula unutk menunggu proses berikutnya.
Untuk Komponen yang digunakan dalam perancangan robot ini adalah sebagai berikut :

Mikrokontroller ATMega328p Dengan modul arduino uno

Driver L293d dengan modul adafruit

Gripper dengan motor servo mg995

IC HX711 sebagai ADC

Sensor Load Cell

Software Sketch arduino

Motot Stepper Nema 17
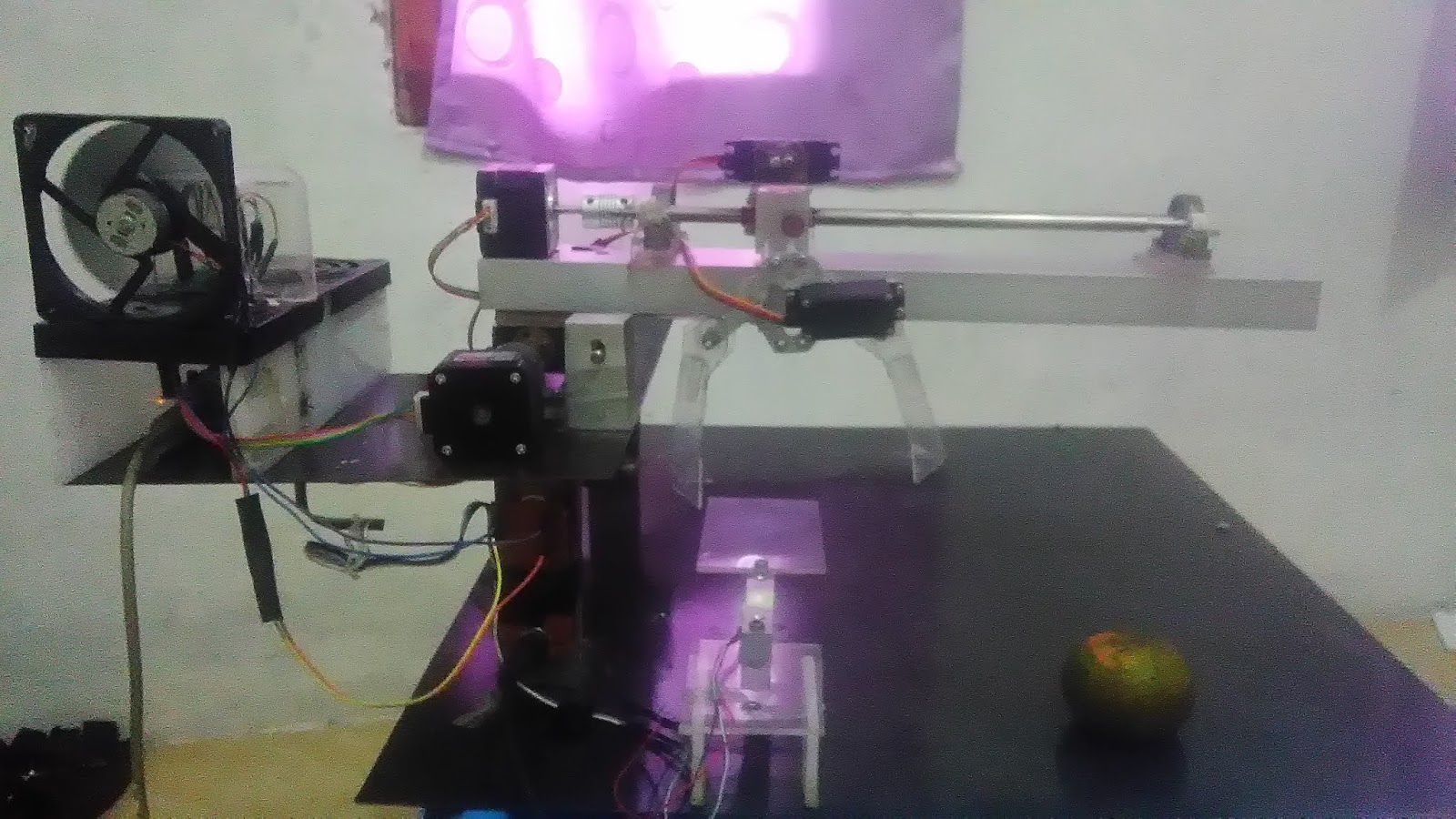
Berikut ini Percobaan pertama yang berhasil menggerakan dua motor stepper